SAMIRA
Das Fahrerassistenzsystem für rangierende Güterzüge
Einladung zur Ergebnispräsentation mit Live-Demo
Im Verbundprojekt SAMIRA2.0 entwickeln die Projektpartner ein Rangierassistenzsystem für geschobene Rangierabteilungen. In den vergangenen Monaten wurden wichtige Meilensteine erreicht. Insbesondere die aktuellen Fahrtests in einer realen Industrie-Umgebung verlaufen sehr positiv. Die Ergebnisse zeigen: SAMIRA2.0 ist auf einem sehr guten Weg, Rangierprozesse künftig sicherer, transparenter und effizienter zu unterstützen. Bis zum Projektende im Herbst 2026 werden weitere Funktionen hinzukommen und die Robustheit des Gesamtsystems weiter erhöht.
Save the Date: Vorstellung der Projektergebnisse mit Live-Demonstration
Wir möchten Sie schon heute herzlich einladen, sich SAMIRA2.0 und die erzielten Projektergebnisse im Rahmen einer Veranstaltung vor Ort anzuschauen:
- Datum: Donnerstag, 17. September 2026
- Uhrzeit: 09:00–15:00 Uhr
- Ort: Eisenbahnmuseum des Vereins Sächsischer Eisenbahnfreunde e.V., Schwarzenberg / Erzgebirge
- Inhalt: Systemvorstellung, Projektergebnisse, Austausch mit den Projektpartnern und Live-Demonstration
Das genaue Programm sowie weitere organisatorische Details werden rechtzeitig vor der Veranstaltung per E-Mail versendet.
Übernachtung & Rahmenprogramm
Für Teilnehmende, die eine Übernachtung planen, ist vom 16.–18.09.2026 ein Zimmerkontingent im Hotel Neustädter Hof (Schwarzenberg) reserviert. Zum Kennenlernen ist für den Vorabend ein gemeinsames Get-together vorgesehen. Darüber hinaus besteht am Mittwoch, 16.09.2026 nachmittags die Gelegenheit, das Eisenbahnmuseum zu besichtigen.
Teilnahme & Anmeldung
Die Teilnahme an der Veranstaltung ist kostenlos. Reise- und Übernachtungskosten tragen die Teilnehmenden selbst. Wenn Sie Interesse haben, können wir Ihre Teilnahme bereits jetzt unverbindlich vormerken. Eine kurze formlose Rückmeldung an die folgende E-Mail Adresse genügt:
Erster SAMIRA2.0 Stakeholder Workshop mit großem Anklang
Am 23.05.2025 fand in einer Online-Veranstaltung der erste Stakeholder-Workshop im Projekt SAMIRA2.0 statt. Hierbei wurden interessierten Fachteilnehmern das Projekt insgesamt sowie auch der aktuelle Entwicklungs-Stand vorgestellt. Die dabei verwendete Präsentation können Sie sich hier herunterladen:
Nach einer Übersicht über das Gesamtprojekt wurden die einzelnen Komponenten, wie das tragbare Multisensor-Modul SAMIRAmobil und die Anzeigeneinheit SAMIRAhmi für den Lokrangierführer erläutert. Danach folgten Erklärungen über die Funktionsweise der Umfeld- und Kollisionserkennung und der Positions- und Lagebestimmung sowie über die Wirkungsweise und das Zusammenspiel der einzelnen Sensoren, wie Laser-Scanner, RADAR-Sensor und der Satellitennavigations-Einheit.
Wir möchten Sie herzlich zu unserem Online-Event am Freitag, den 23. Mai einladen. Gemeinsam mit unseren Projektpartnern präsentieren wir die Fortschritte und Ziele des Projekts und geben einen exklusiven Einblick.
Ein weiterer technische Schwerpunkt stellte die Datenübertragung über das 5G-Mobilfunknetz dar.
Im Anschluss gab es dann Fragen zu technischen Details aber auch eine offene Diskussion über verschiedene Anwendungsfälle für das SAMIRA-Gesamtsystem. Das aktuelle Konzept hat besonders dort seine Stärken, wo längere Rangiereinheiten verschoben werden, z.B. bei Hafenbahnen oder beim Materialtransport bei Industriebahnen. Bei Rangieranwendungen, bei denen sehr häufig die Wagen umgestellt werden oder in der Zugbildung ist das aktuelle Verfahren weniger geeignet.
Insgesamt fand das SAMIRA-Konzept großen Anklang bei dem teilnehmenden Fachpublikum und der Austausch mit Fachleuten aus der Praxis wird auf jeden Fall weitergeführt werden.
Das SAMIRA-Team freut sich über Fragen und Anregungen auch von Personen, die nicht am Workshop teilgenommen haben. Bitte zögern Sie nicht, uns zu kontaktieren, zur ersten Kontaktaufnahme senden Sie am besten eine kurze E-Mail an:
Die Ausgangslage
Zur Bekämpfung des Klimawandels und einer überlasteten Straßeninfrastruktur muss mehr Transportleistungen auf die Schiene zu verlagert werden. Um dies zu erreichen, müssen die heutigen zeit- und kostenintensiven Prozesse und Abläufe insbesondere im Rangierbetrieb von Schienenfahrzeugen, deutlich beschleunigt und sowohl die Effizienz als auch die Flexibilität maßgeblich erhöht werden. Gleichzeitig kann dies nur erreicht werden, wenn auch dem aus dem demografischen Wandel in der Branche resultierenden Fachkräftemangel entgegengewirkt wird. SAMIRA kann einen entscheidenden Beitrag leisten, um diese Herausforderungen zu bewältigen und den Schienengüterverkehr wieder attraktiver zu machen.
Das SAMIRA-Projekt ist das Resultat aus mehreren Gesprächen mit der RheinCargo GmbH & Co. KG, Neuss, dem Lehrstuhl für Schienenfahrzeugtechnik der Fachhochschule Aachen und dem Automotive & Rail Innovation Center (ARIC GmbH), Wegberg, bei dem diese Punkte diskutiert wurden. Ein wesentliches Ziel ist es, den steigenden Fachkräftemangel mit einem modernen High-Tech-System icht-Tech-Systemzu begegnen, das auch von den aktuellen Entwicklungen im Automobilbereich profitiert, wie robuste Sensorik und hohe Stückzahlen.
Die Machbarkeit dieses Ansatzes wurde bereits durch das Projekt SAMIRA1 erbracht, das 2019 bis 2023 im Rahmen einer Ziel2-Förderung des Landes Nordrhein-Westfalen und der Europäischen Union in einem Konsortium von ARIC GmbH, RheinCargo und der Westfälischen Lokomotiv-Fabrik Reuschling GmbH & Co. KG durchgeführt wurde. Die ARIC GmbH wurde in der Zwischenzeit infolge der Nachfolgeregelung von der IKADO GmbH, Aachen, übernommen, die das SAMIRA-Projekt nun maßgeblich weiterführt.
Zielsetzung von SAMIRA2.0
Die Zielstellung von SAMIRA2.0 ist es, das System aus dem Vorgängerprojekt weiterzuentwickeln und die Funktionalität im realen Probebetrieb nachzuweisen. SAMIRA2 reduziert die erforderlichen Ressourcen in der letzten Meile, erhöht die Sicherheit im Rangierbetrieb und ist die Basis für einen autonomen Eisenbahnbetriebe. Es werden die Flexibilität sowie die Wirtschaftlichkeit und Wettbewerbsfähigkeit des Verkehrsträgers Schiene deutlich verbessert und es werden die Weichen für eine moderne, schienengebundene Logistik gestellt.
SAMIRA2 ist ein Assistenzsystem für Rangierfahrten in der letzten Meile, wobei moderne Sensorik in einem tragbaren Sensormodul (SAMIRAmobil) an dem letzten Waggon einer Rangierabteilung befestigt wird und es dem Lokrangierführer damit ermöglicht, auch ohne einen Rangierbegleiter geschobene Fahrten durchzuführen. Dazu kann der Lokrangierführer im Führerhaus über das SAMIRA-System auch die integrierte Hupe und Leuchte am Zugende betätigen.
Auf einem Display im Führerhaus der Lokomotive (SAMIRAhmi) wird der Echtzeit-Videostream vom letzten Waggon angezeigt, in dem zusätzlich mittels Augmented Reality wichtige Merkmale wie Personen in Gleisnähe, Abstände und Geschwindigkeiten hervorgehoben werden.
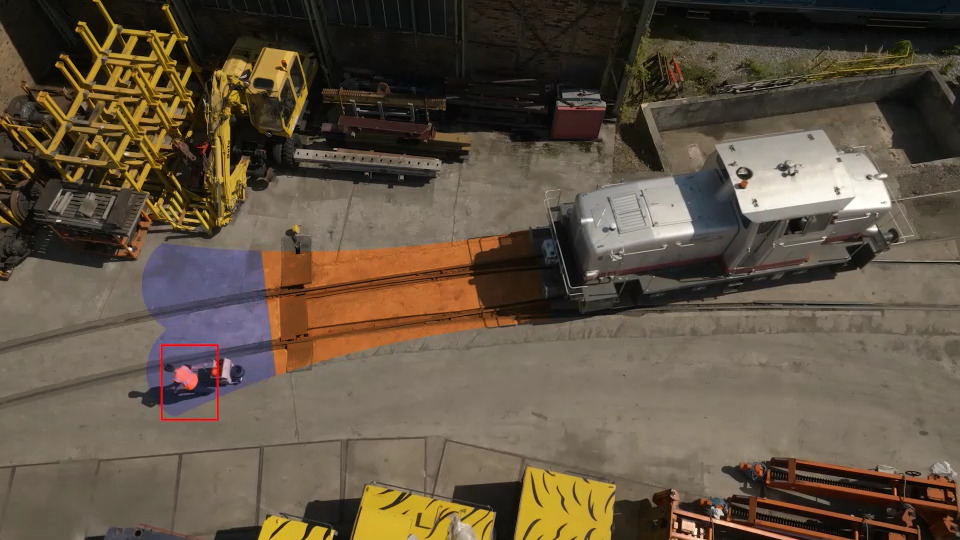

Außerdem werden Hindernisse auf dem vorausliegenden Fahrweg erkannt und dem Lokrangierführer wird, falls nötig, eine Bremsempfehlung angezeigt. Wichtige weitere Informationen, wie die Lage einer vorausliegenden Weiche oder der prognostizierte Bremsweg, können ebenfalls in den Videostream eingeblendet werden.
Der Lokführer erhält damit einen umfassenden Überblick über das Geschehen am anderen Ende der Rangierabteilung. Dazu werden die Live-Daten sicher mittels der Mobilfunk-Schlüsseltechnologie 5G vom Sensormodul an das Display auf der Lok übertragen. Das langfristige Ziel ist, Rangierfahrten, z.B. ganzer KV-Züge in Hafenbereichen oder in Industriegeländen, vollständig autonom durchführen zu können.
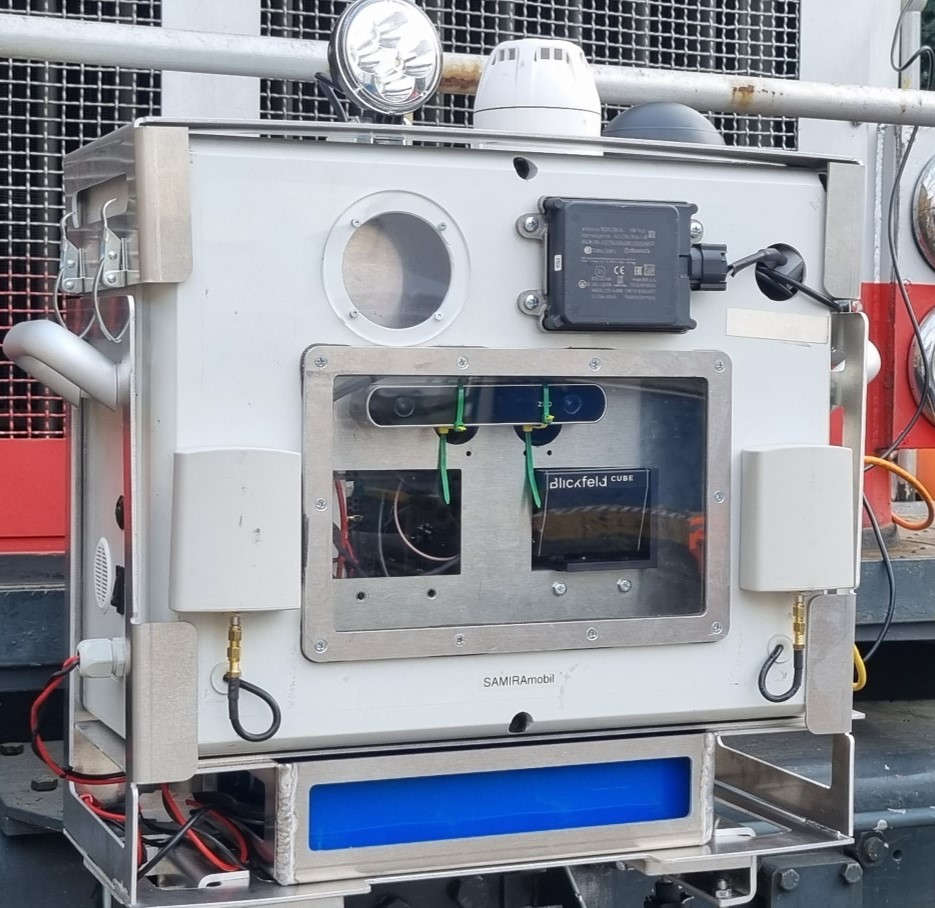
Das Foto zeigt den aufgebauten SAMIRA-Demonstrator mit Umfeldsensorik (LiDAR, Radar, Kameras), satellitenbasierter Positionsbestimmung (Galileo, GPS), Inertialsensor sowie der Datenübertragung des Videostreams über ein auf dem Gelände installierten Multi-Access-Point Mesh-Netzwerk.
In SAMIRA2.0 werden nun Größe und Gewicht deutlich reduziert.
Dieses SAMIRAmobil-Modul beinhaltet auch eine integrierte Bilddatenauswertung für die Augmented Reality zur Kennzeichnung von Hindernissen und Gefahrenstellen, eine kartenbasierte Fahrwegserkennung sowie die Prognose des weiteren Fahrtenverlaufs.
Innovationen im Projekt
Die durch das Projekt entstehenden Innovationen sind vielfältig und bilden zusammen die Grundlage für ein zukünftiges, autonomes Rangieren. Auf die bereits beim Aufbau des Demonstrators gemachten Entwicklungen und Erfahrungen wird weiter aufgebaut und konsequent fortgeführt. Sie können in drei Bereiche gruppiert werden:
KI zur Gefahrraumüberwachung im Rangierbetrieb
Der Bahnbetrieb in der letzten Meile stellt eine besondere Herausforderung dar. Um eine kamerabasierte Objekterkennung zu ermöglichen, wird eine künstliche Intelligenz entwickelt, welche für die Anwendung optimiert ist.
- Trainieren einer eigenen KI, welche für die im Rangierbereich vorkommenden Spezialfälle optimier ist
- Erkennung von Signalen und Signaltafeln
- Fusion mit weiteren Sensoren zur Gefahrraumüberwachung

Sichere Echtzeit-Datenübertragung
Für die Daten¬übertragungen von den Sensormodulen zum Führerstand der Lokomotive gelten sehr strenge Echtzeit- und Sicherheitsanforderungen. Aus den Erfahrungen beim Aufbau des Demonstrationssystems erfolgt die Datenübertragung bei SAMIRA2.0 nun nicht mehr über ein proprietäres Multi-Mesh-WLAN-System, sondern auf Basis eines 5G-Netzwerks.
- Sichere, latenzminimierte Echtzeit-Datenübertragung vom/zum fahrenden Zug über das öffentliche 5G Netz
- Kompensation von Funklöschern und Kommunikation innerhalb von Werkshallen über private Campusnetze
- Übergabe zwischen öffentlichem 5G Netz und lokalem 5G Campusnetz während des Betriebs
Hochgenaue Positionslösung
Für ein sicheres System ist eine hochgenaue, gleisselektive Positionsberechnung unabdingbar. Während die gleisselektive Positionslösung bereits im Demonstrator sehr gut Ergebnisse lieferte, wird die laterale Positionsgenauigkeit auf dem Gleis nun noch weiter verbessert.
- Verwendung eines GNSS-INS-System mit RTK, um eine Genauigkeit im Centimeter-Bereich zu erreichen
- Verwendung von digitalen Gleiskarten zur Stabilisierung der Position
SAMIRA ist zukunftsweisend
SAMIRA ist ein Fahrerassistenzsystem für Güterzüge im bidirektionalen Betrieb, bestehend aus umfassender Umfeldsensorik am Zug kombiniert mit künstlicher Intelligenz (KI). In Verbindung mit der sicheren, drahtlosen Datenübertragung in Echtzeit lässt sich die Umgebung eines Güterzuges und dessen Fahrwege sicher überwachen. Mit diesen Daten kann der Zugführer umfassend informiert werden und im Falle eines Falles auch umgehend gewarnt werden. Die Sensoren und deren Auswertungen mit KI unterstützen den Menschen und erhöhen die Sicherheit.
Da der augmentierte Videostream über ein Netz übertragen wird, stehen diese Daten jedem zur Verfügung, der über eine entsprechende Berechtigung verfügt, so z.B. den Mitarbeitern in der Leitstelle oder Personen bei Gleisbauarbeiten abgerufen werden.
Langfristig wird das SAMIRA-System die Digitalisierung in der letzten Meile ermögli¬chen, die erforderlichen Ressourcen reduzieren und eine erste Basis für einen autonomen Eisenbahnbetrieb bilden, z.B. wenn jeweils ein SAMIRAmobil-Modul an beiden Enden des Zugs angebracht wird oder eine Festinstallation in die Rangierlok erfolgt. Damit wird die Wettbewerbsfähigkeit des Verkehrsträgers Schiene signifikant verbessert.
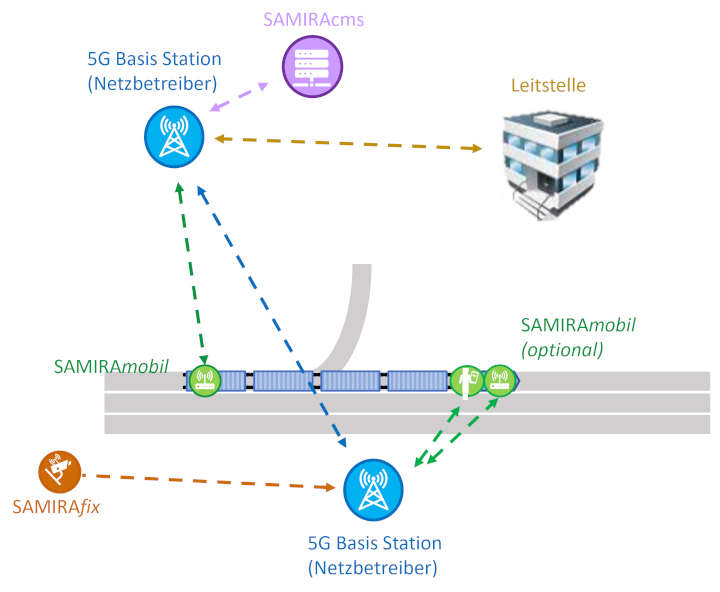
Zukunftsweisend ist auch die sichere Datenübertragung mittels der 5G-Technologie. Mit diesen allgemein verfügbaren Netzen lassen sich jegliche Daten übertragen, so z.B. technische Betriebsdaten an eine Leitstelle, Betriebsfunk oder Daten zur Unterstützung von Logistik 4.0.
Die Kernstücke des Moduls SAMIRAmobil lassen sich auch zu einem stationären Modul konfigurieren (SAMIRAfix). Dieser Baustein kann z.B. an Gefahrstellen wie Bahnübergängen oder unübersichtlichen Gleisharfen an einem Mast oder einer Gebäudefassade fest installiert werden und die integrierte Sensorik liefert wertvolle Daten und Gefahrenhinweise sowie mittels einem Livestream eine Übersicht von den örtlichen Begebenheiten.
Bei SAMIRA handelt es sich um ein modulares skalierbares System, das sich auf alle Gegebenheiten im Gelände und den jeweiligen Anforderungen gezielt zuschneiden lässt und auch in Zukunft jederzeit erweitert und angepasst werden kann. Die standardisierte 5G-Technologie als Netzwerk-Backbone gewährleistet eine äußerst sichere und deterministische Datenübertragung im Netz mit Standard-Industrie-Komponenten, die auch im Falle eines Defekts sehr schnell wieder Instand gesetzt werden können.
Das Projekt SAMIRA2.0 läuft noch bis zum Mai 2027. Vor dem Projektende wird es eine reale Demonstration der Projektergebnisse auf einem industriellen Rangiergelände geben. Bei Interesse an unseren Arbeiten können Sie uns sehr gerne kontaktieren, wir würden uns darüber sehr freuen!
Danksagung:Das gesamte Projektteam bedankt sich ausdrücklich beim Eisenbahn-Bundesamt (EBA) und dem darin integrierten Deutschen Zentrum für Schienenverkehrsforschung (DZSF) für die Genehmigung des Projekts und die erhaltenen Fördermittel für das Forschungsprojekt SAMIRA2.0. Ohne diese Unterstützung könnte das Vorhaben nicht realisiert werden. Förderkennzeichen: BMDV 53T23001IK.
Bundesprogramm „Zukunft Schienengüterverkehr“:
Website